

Our collaboration with the Toyota Research Institute, IU Computer Vision Lab, and older adults aims to develop a home robot that supports their “ikigai,” or sense of purpose and meaning in life, as they age. As aging can make it challenging to maintain a sense of purpose and engagement in the community, we aim to address this need through meaningful activities, relationships, and social contributions.
Socially Enabling Robots to Support Ikigai and Community Engagement of Older Adults
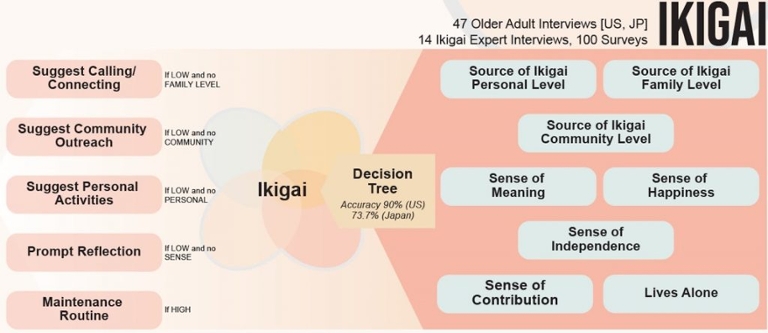
To achieve this, our research team is creating social robot interaction capabilities and intervention activities through a combination of interviews, surveys, observations, and co-design sessions with older adults in assisted living and memory care facilities in Bloomington. We are developing personalized ikigai models and recommendations for participants using the QT robotic platform and relevant perception capabilities. We are also creating social robot interaction capabilities and intervention activities that encourage reflection through photographs and prompts on what brings meaning to participants’ lives.

The Robot Operating System (ROS) is being used to control the robot and ensure natural and engaging human-robot interaction. To create an even more effective and engaging experience, we are leveraging advanced technologies such as GPT-3 for natural language processing and other AI algorithms for emotion-based recognition using both computer vision and vocal tones. By analyzing these cues, the robot can better understand the emotional state of the user and respond in a more appropriate and supportive manner.

The project’s goal is to enable the robots to help older adults achieve increased feelings of ikigai by identifying and reflecting on meaningful activities and relationships and suggesting opportunities for further development of meaningful pursuits and social connections. Additionally, the “ikigai robot” may indirectly support the families and caregivers of older adults.
By focusing on natural interaction design and incorporating advanced technologies like GPT-3 and emotion-based recognition, we aim to create a robot that is both effective and enjoyable to interact with, and that addresses the social and psychological factors that impact human-robot interaction.
Co-Design of Robots for In-Home and Clinical Use by Adults with Depression
An estimated 17.3 million adults aged 18 or older (7.1% of the adult population in the U.S.) had at least one major depressive episode in 2017. Since 2014, we have been working together with patients and clinicians in to inform the design of socially assistive robots that can provide support for and alleviate the symptoms of depression. In our earlier Participatory Design (PD) studies, we found that older adults with depression and clinicians who work with them can contribute to social robot design, that loneliness and the need for companionship are significant needs that they think social robots can help address, and that older adults and clinicians are interested in using information from sensors onboard the robot to reflect on their mental health status and everyday behaviors. We also tested how older adults with depression use socially assistive robots, in this case Paro, in their homes, and found that daily use can improve symptoms of depression (PHQ-9).
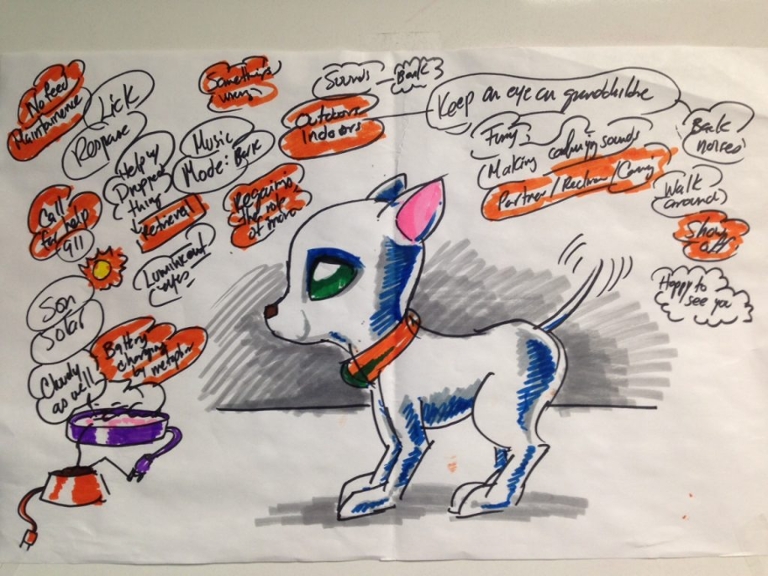
In our current NSF-funded study (IIS-#1900683), we are performing PD workshops with adults with depression and clinicians to customize the capabilities and behaviors of Therabot, a pet-like companion robot, to improve patient health and well-being. We are also working together to identify appropriate therapeutic interventions using this platform to address the needs of individuals diagnosed with depression. The effectiveness of the modified robots will be evaluated in clinical settings and by means of longer-term use in patient homes. The project aims to advance healthcare robotics and human-robot interaction through a combination of onboard sensors that provide additional information to clinicians along with artificial intelligence to customize the interactions of the robot with the patient. Researchers: Casey C. Bennett, Sawyer Collins, Jennifer Piatt, Sawyer Collins, Natasha Randall, Lori Eldridge, Wynnie Chang, Shinichi Nagata, Cedomir Stanojevic
Studies of Robot Use in Eldercare Institutions

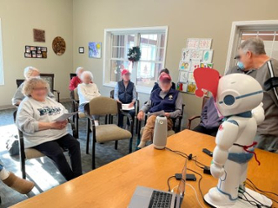
The majority of Human-Robot Interaction (HRI) studies have been oriented to one-on-one interaction in constrained and experimental settings. In this project, we use the socially assistive seal-like robot PARO to study how human-robot interaction develops in long-term use in the context of a local nursing home. We are particularly interested in seeing how different uses and interpretations of the robot emerge through naturalistic interactions between nursing home staff, residents, and visitors. Over ten years of scholarly and clinical study of PARO have copiously documented the robot’s positive psychological, physical, and social effects on older adults, including improved mood and decreased stress levels after using PARO. Our own studies expand on this prior work by exploring the interaction mechanisms and dynamics through which these therapeutic effects happen, particularly emphasizing how PARO is socially scaffolded by people and interactions in its environment and how robotic technology and its social uses and effects are mutually shaped in ongoing interactions. This project includes ethnographic studies and behavioral analysis of PARO’s use in a small Multi-Sensory Behavioral Therapy (MSBT) group, of people’s interactions with PARO in a public area of the nursing home to see how interaction develops voluntarily, the appropriation and emergent uses of PARO by the nursing home staff, and applying pet therapy practices to PARO to include it in regular activity in the nursing home. This research is funded by NSF IIS-1143712. Researchers: Swapna Joshi, Wan-Ling Chang, Selma Šabanović, Casey Bennett, Lesa Huber, Maria P Lopes, Sheryl Hamner
Publications
- Khoo, W., Hsu, L.-J., Amon, K. J., Chakilam, P. V., Chen, W.-C., Kaufman, Z., Lungu, A., Sato, H., Seliger, E., Swaminathan, M., Tsui, K. M., Crandall, D. J., & Sabanović, S. (2023). Spill the tea. Companion of the 2023 ACM/IEEE International Conference on Human-Robot Interaction. https://doi.org/10.1145/3568294.3580067
- Randall, N., Joshi, S., Kamino, W., Hsu, L. J., Agnihotri, A., Li, G., Williamson, D., Tsui, K. & Šabanović, S. (2022). Finding ikigai: How robots can support meaning in later life. Frontiers in Robotics and AI, 9.
- Randall, N., Kamino, W., Karim, A., Chen, W. C., Hsu, L. J., Tsui, K. M., & Sabanovic, S. (2023, March). ‘Ikigai’ Robots: Designing for Direct Benefits to Older Adults and Indirect Benefits to Caregivers. In Companion of the 2023 ACM/IEEE International Conference on Human-Robot Interaction (pp. 701-705).
- Randall, N., Bennett, C. C., Šabanović, S., Nagata, S., Eldridge, L., Collins, S., & Piatt, J. A. (2019). More than just friends: in-home use and design recommendations for sensing socially assistive robots (SARs) by older adults with depression. Paladyn, Journal of Behavioral Robotics, 10(1), 237-255.
- Randall, N., Šabanović, S., & Chang, W. (2018, May). Engaging older adults with depression as co-designers of assistive in-home robots. In Proceedings of the 12th EAI International Conference on Pervasive Computing Technologies for Healthcare (pp. 304-309).
- Bennett, C. C., Sabanovic, S., Piatt, J. A., Nagata, S., Eldridge, L., & Randall, N. (2017, August). A robot a day keeps the blues away. In 2017 IEEE International Conference on Healthcare Informatics (ICHI) (pp. 536-540). IEEE.
- Lee, H. R., Šabanović, S., Chang, W. L., Nagata, S., Piatt, J., Bennett, C., & Hakken, D. (2017, March). Steps toward participatory design of social robots: mutual learning with older adults with depression. In Proceedings of the 2017 ACM/IEEE international conference on human-robot interaction (pp. 244-253).
- Šabanović, S., Chang, W. L., Bennett, C. C., Piatt, J. A., & Hakken, D. (2015, August). A robot of my own: participatory design of socially assistive robots for independently living older adults diagnosed with depression. In International conference on human aspects of it for the aged population(pp. 104-114). Springer, Cham.
- Šabanović, S., Bennett, C. C., Piatt, J. A., Chang, W., Hakken, D., Kang, S., & Ayer, D. (2014). Participatory design of socially assistive robots for preventive patient-centered healthcare. In IEEE/RSJ IROS workshop on assistive robotics for individuals with disabilities.
- Joshi, S., & Šabanović, S. (2019, March). Robots for inter-generational interactions: implications for nonfamilial community settings. In 2019 14th ACM/IEEE International Conference on Human-Robot Interaction (HRI) (pp. 478-486). IEEE.
- Joshi, S., & Šabanović, S. (2017). A communal perspective on shared robots as social catalysts. In 2017 26th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN) (pp. 732-738). IEEE.
Šabanović, S., & Chang, W. L. (2016). Socializing robots: Constructing robotic sociality in the design and use of the assistive robot PARO. AI & society, 31(4), 537-551. - Chang, W. L., & Sabanovic, S. (2015, March). Interaction expands function: Social shaping of the therapeutic robot PARO in a nursing home. In 2015 10th ACM/IEEE International Conference on Human-Robot Interaction (HRI)(pp. 343-350). IEEE.
- Chang, W. L., Šabanovic, S., & Huber, L. (2014, August). Observational study of naturalistic interactions with the socially assistive robot PARO in a nursing home. In The 23rd IEEE International Symposium on Robot and Human Interactive Communication (pp. 294-299). IEEE.
- Chang, W., S., Šabanović, S., Huber, L. (2013). “Situated Analysis of Interactions Between Cognitive Impaired Older Adults and the Therapeutic Robot PARO” Proceedings of the International Conference on Social Robotics (ICSR 2013), Bristol, UK, October 2013.
- Chang, W., Šabanović, S., Huber, L. (2013) “Social Shaping of Interactions between Older Adults and the Therapeutic Robot PARO.” Workshop at the International Conference on Social Robotics (ICSR 2013), Bristol,UK, October 2013.
- Šabanović, S., Bennett, C.C., Chang, W.-L., and Huber, L. PARO robot affects diverse interaction modalities in group sensory therapy for older adults with dementia. Rehabilitation Robotics (ICORR), 2013 IEEE International Conference on, (2013), 1–6.
- Chang, W., Šabanović, S., Huber, L. (2013) “Use of Seal-Like Robot PARO in Sensory Group Therapy for Older Adults with Dementia.” Proceedings of HRI 2013, Late-Breaking Reports, Tokyo Japan, March 2013.
Interested in Joining?
Are you interested in learning more about our lab? If you are feel free to reach out on our Contact page. We'd love for you to join our lab!